Импульсный регулируемый блок питания на основе DC Buck Boost конвертера ZK-4KX
 Срочно понадобился регулируемый блок питания для выезда в командировку. Требования к БП были не очень сложные, напряжение питания от 1.5 до 30В, ток в пределах 2-3А, и желательно как можно более легкий прибор. Габариты чем меньше, тем лучше, но в разумных пределах, конечно. Посмотрел на свой «зоопарк» блоков питания, и ничего не нашел подходящего, по весу и габаритам. Задумчиво полез перебирать всевозможные блоки, купленные ранее про запас и часто спонтанно на Алиэкспресс… И в коробке наткнулся на Buck Boost конвертер ZK-4KX. Покрутил его в руках, и решил что вероятно это именно то, что мне нужно.
Срочно понадобился регулируемый блок питания для выезда в командировку. Требования к БП были не очень сложные, напряжение питания от 1.5 до 30В, ток в пределах 2-3А, и желательно как можно более легкий прибор. Габариты чем меньше, тем лучше, но в разумных пределах, конечно. Посмотрел на свой «зоопарк» блоков питания, и ничего не нашел подходящего, по весу и габаритам. Задумчиво полез перебирать всевозможные блоки, купленные ранее про запас и часто спонтанно на Алиэкспресс… И в коробке наткнулся на Buck Boost конвертер ZK-4KX. Покрутил его в руках, и решил что вероятно это именно то, что мне нужно.
Я не планировал писать обзор на эту железяку, но поскольку она основа моего блока питания, то конечно протестируем модуль, и я вкратце расскажу про него, и про то что в итоге получилось. Всем кому интересна эта тема — Велком!
UPD: Про просьбам трудящихся добавил осциллограммы при различных сценариях включения прибора.
Эпиграф: «Я его слепила из того что было. »
Подходящий модуль питания, это уже почти полдела, так же в закромах выкопал:
— Импульсный блок питания MW 24В 2.1А лет 5 купленный в оффлайн
— Коробку из пластика для DIY конструкций, почти подходящего размера (куплена в оффлайн, хотелось бы на пару сантиметров побольше, но на безрыбье и рак рыба)
— Вентилятор улитку 12В 0.1А (покупал на Али в увлажнитель, но с размером не угадал)
— Импульсный понижающий модуль малой мощности (тоже был куплен давно на Али)
Ну и понятное дело, что провода, клеммы, предохранители, кнопки всегда найдутся в закромах радиогубителя.
Попытался все вышеперечисленное запихать в корпус, не хватало буквально 5мм для полного счастья, что бы Импульсный блок питания разместить с модулем Buck Boost конвертера ZK-4KX. Выход нашел через некоторое время, закрепив ИИП на крышку корпуса, только в таком положении мог выиграть эти нужные мне 5 мм. В прочем, закреплен ИИП хорошо, на латунные «столбики» и в этом перевернутом положении. 
Вырезаем на лицевой панели 2 прямоугольных отверстия и сверлим 2 круглых под клеммы. Все село на свои места замечательно. 
Примеряем… Вроде входит и выходит, крышку закрыть не мешает. 
Соединяем выходные клеммы с выходами модуля при помощи проводов достаточного сечения, и как можно более короткими. 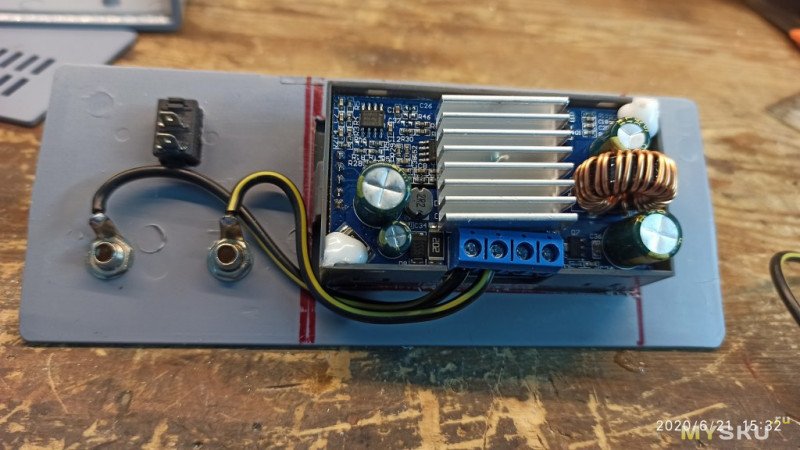
Подключаем выход ИИП к входу модуля Buck Boost конвертера, так же подключаем шнур питания через дополнительный керамический предохранитель (лишним не будет) 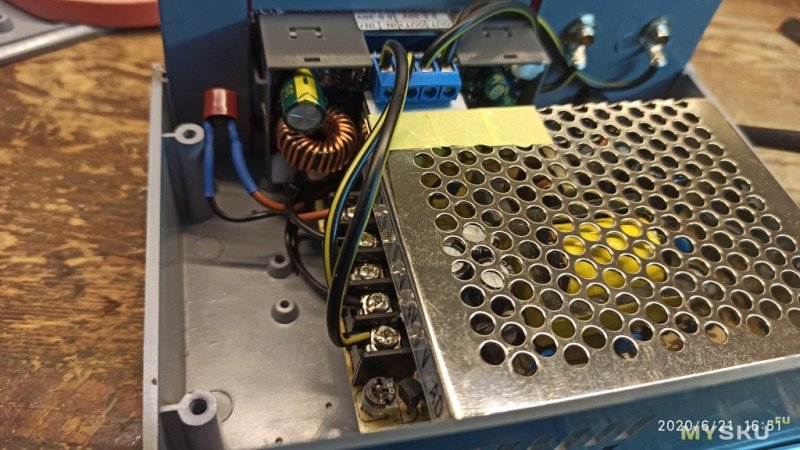
Задумчиво смотрим на вентилятор улитку… 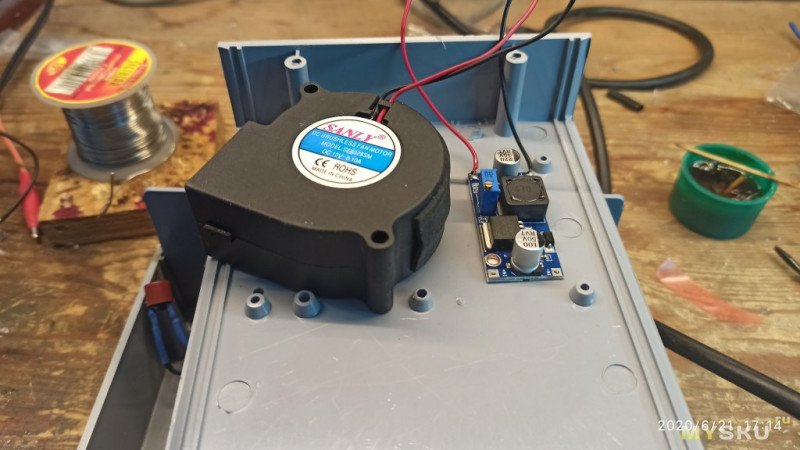
И пытаемся впихнуть невпихуемое… 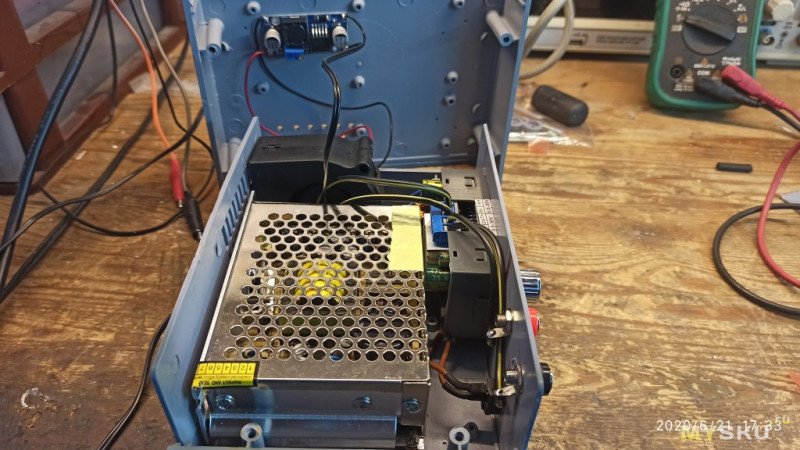
Влез прям впритык, но зато не требуется вентилятор закреплять, поскольку он сел довольно плотно, греметь внутри точно не будет.
На нижней стенке крепим на двухсторонний скотч маленький импульсный понижающий модуль. Он нужен для того, что бы снизить напряжение ИИП в 24 вольта, до нужных 12В от которых работает вентилятор. Я заранее выставил на модуле 10,5В, при этом напряжении, и так почти бесшумного вентилятора, не слышно вообще…
Собственно всё. Ставим нижнюю крышку (в которой просверлены отверстия для вентиляции аккурат под модулем) и стягиваем 2 половинки корпуса винтами, не забыв так же надеть ножки. 
Вот такой он получился «цветочек аленький». 
Вид с боку. 
Подключаем небольшую нагрузку (мощный зеленый проволочный резистор) и перекрестившись даем питание. Ничего не взорвалось — уже хорошо. В этот раз рискнул и первый запуск не делал последовательно с лампой накаливания, как обычно, тестирую свои самодельные импульсные блоки питания. Все работает. Вентилятора не слышно. 
Внимательный читатель помнит, что Импульсный блок питания у меня на 24В, но поскольку модуль Buck Boost конвертер, он может повышать напряжение до 30В, конечно при снижении максимального тока, но мне этих возможностей достаточно. 
Примененный мною модуль Buck Boost конвертера ZK-4KX имеет множество настроек, управление не самое удобное, но все же получше чем у новых версий, и кроме того, кнопки очень мягко нажимаются, в отличие от мембранных кнопок в новых версиях модулей.
Характеристики модуля китайцы приводят такие:
Входное напряжение: 5,0-30 в
Выходное напряжение: 0,5-30 в
Выходной ток: может работать стабильно на 3 А в течение длительного времени и может достигать 4 а при усиленном рассеивании тепла
Выходная мощность: Естественное тепловыделение 35 Вт, усиление тепловыделения 50 Вт
Разрешение дисплея напряжения: 0,01 В
Текущее Разрешение дисплея: 0.001A
Эффективность преобразования: около 88%
Мягкий старт: Да (с высокой мощностью и нагрузочным модулем может не работать при запуске)
Механизм защиты:
Входное анти-обратное соединение;
Выход анти-обратного орошения;
Входная защита от пониженного напряжения (4,8-30 в регулируется, по умолчанию 4,8 В)
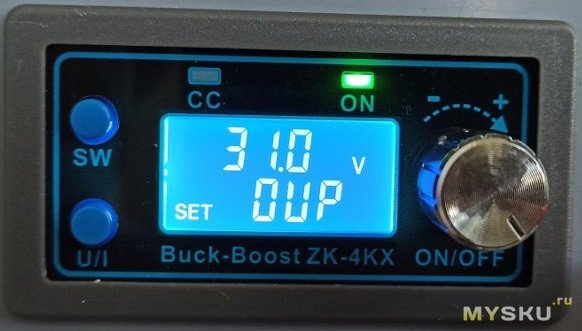
Защита от перенапряжения на выходе (0,5-31 В регулируется, по умолчанию 31 В)
Защита от перегрузки по току 0-4.1a (регулируется, по умолчанию 4.1a)
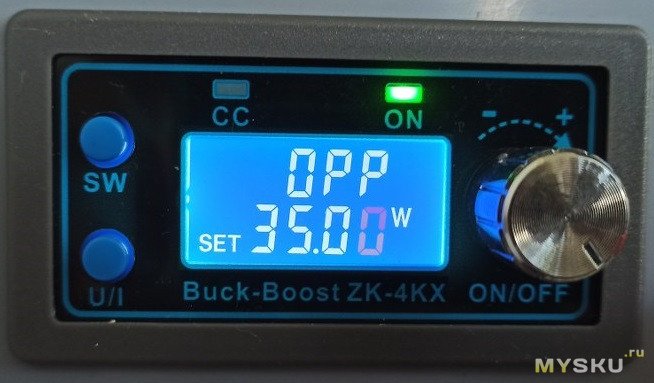
Защита от избыточной мощности (0-50 Вт регулируется, по умолчанию 50 Вт)
Защита от перегрева (80-110℃Регулируется, по умолчанию 110 ℃)
Защита таймаута (0-100h регулируется, выключено по умолчанию)
Сверхмощная защита (0-60 ач регулируется, по умолчанию выключено)
Рабочая частота: 180 кГц
Размеры: длина * ширина * высота 79 мм * 43 мм * 26 мм
Управление модулем происходит при помощи 2-х кнопок (короткое и долгое нажатие задействует разные меню настроек) так и ручкой энкодера (вращение ручки и нажатие)
Короткое нажатие на кнопку U/I интуитивно понятно ведет к меню в котором можно задать выходное напряжение и ток. Вращение ручки энкодера плавно меняет значение, нажатие на кнопку энкодера меняет декады (вольты — десятые вольта, амперы-десятые ампер) 
Долгое нажатие на кнопку U/I переводит в меню настроек:
Где можно выставить подается ли напряжение на выходные клеммы по умолчанию (да-нет) 
Далее кнопкой SW переходим на следующий пункт меню: порога защиты от низкого напряжения LUP (видать этот модуль можно подключать к аккумуляторной батарее, и тут задаются параметры отключения по разряду АКБ) 
Далее идут настройки:
— OUP — порог защиты от перенапряжения; OCP — порог защиты от перегрузки по току; OPP — Верхний порог входного напряжения; OAP — порог защиты по емкости; OHP порог по времени (тайм аут); OTP — выставление защиты от перегрева.







Короткое нажатие на кнопку SW перелистывает различные варианты отображения информации в ходе работы блока питания. Так же спрячу все под спойлер.






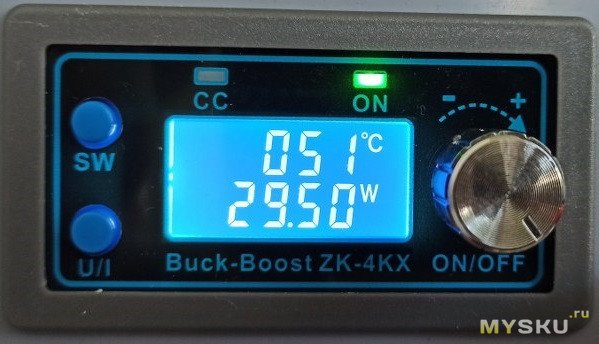
В общем разнообразная информация на любой вкус и пожелание.
Ну и посмотрим осциллограммы процессов возникающих при включении и выключении нагрузки. 
А это помехи при работе Блока питания при 12В 
Тоже помехи, но в режиме бустера и напряжении 30В. 
Ничего страшного я на осциллограммах не нашел, вроде вполне неплохо с моей точки зрения.
UDP: Про просьбам трудящихся осциллограммы включения и выключения испытуемого блока питания при разных сценариях
1. Нагрузка Резистор. Напряжение 30В ограничение тока 0.9А
Включение 
Выключение 
2. Нагрузка Лампочка 12В 35Вт Напряжение 13В ограничение тока 2.1А
Включение 
Выключение 
3. Светодиод 25В 300мА Напряжение 24В ограничение тока 300мА
Включение 
Выключение 
4. Нагрузка Конденсатор 2200 мкФ 50В
Включение 
Выключение 
ИМХО, я опять ничего страшного не вижу на осциллограммах, но я не инженер, может кто прокомментирует, кто понимает больше чем я.
На этом всё! Нормальные и по делу комментарии приветствуются, на неадекватные комментарии я отвечать не буду, уж извините заранее.
Обзор накидал за полчаса, потому заранее прошу прощения за погрешности и недочеты…
Всем мира и добра!
Котейко одобрил…

DIY: Простейший робот Buck. Пошаговая инструкция по созданию
Представляем вам очень простого робота по имени Buck. Принцип его работы похож на движения насекомых. С пружинистыми ногами робот создает немного шума при ходьбе. Когда он шагает, наступает некий момент интриги. Это держит людей в напряжении, что является хорошим атрибутом для любого робота. Мы поможем вам создать это милое устройство без особых усилий и денежных затрат.



Шаг 1. Подготовьте необходимые детали:

- серводвигатель непрерывного вращения, настроенный в правильном направлении – 1 шт
- пластиковый контейнер размерами 4″ x 3″ x 2″ – 1 шт
- отсек для 4 AA батареек – 1 шт
- 5-дюймовая цилиндрическая металлическая опора для тяги (подойдет металлическая ручка для дверей) – 1 шт
- болт 8-32″ x 2″ – 1 шт
- гайки 8-32 – 3 шт
- болты 4-40 x 3/4″ – 2 шт
- гайки 4-40 – 4 шт
- 1/8″ (внешний диаметр) x 1/2″ пластиковая прокладка – 2 шт
- растягивающаяся пружина от 3/4″ к 1″ – 1 шт
- 4-40 x 1/4″ гайки и болты – 2 шт
- набор стяжек.
Шаг 2. Просверлите отверстия:
Просверлите два отверстия размером 1/8 ” друг напротив друга в лопастях серводвигателя. Смотрите образец на картинке.


Шаг 3. Закрепите болты:
Вставьте болты 4-40 х 3/4 ” в готовые отверстия в серводвигателе.
Закрутите гайки до упора и закрепите их на месте.
Сверху установите пластиковую прокладку, а затем прикрутите другую гайку, чтобы закрепить всё вместе.




Шаг 4. Сделайте пометку на опоре:
Возьмите металлическую опору для тяги и с помощью линейки отступите 3 дюйма от одной стороны ручки и сделайте пометку.


Шаг 5. Сделайте отверстие:
Просверлите 3/16 “отверстие в ручке в том месте, которое было отмечено.


Шаг 6. Пружина:
Вставьте пружину на кончик 2″ болта. Закрепите её твердо на месте с помощью гайки.
Протяните другую гайку на нижнюю половину болта.
Теперь продвиньте болт в отверстие, которое было просверлено в металлической опоре для тяги.
Закрепите болт на месте резьбы с еще одной гайкой.





Шаг 7. Сделайте отверстия в пластиковом судочке:
Переверните пластиковый контейнер вверх дном. Измерьте 1/4 “сверху контейнера и 2” с одной его стороны. Сделайте пометку.
Сделайте пометки так, чтобы они были видны на противоположной стороне пластикового контейнера.
Просверлите обе эти пометки размером 1/2 “.





Шаг 8. Вставьте опору в контейнер:
Вставьте металлическую ручку через 1/2 “отверстия, которые были просверлены в контейнере. Опорные стойки ручки должны быть направлены таким образом, что бы они торчали вверх из отверстий контейнеров.
Ножки опоры также должны торчать сзади открытого пластикового контейнера.
Примечание: опора для тяги, которая использовалась здесь, является съемной ручкой, которую легко открутить. Имея возможность снять её, вставьте ее на место и заново установите. Сделайте эту задачу проще.


Шаг 9. Просверлите ещё отверстия:
Поместите свободный конец пружины так, чтобы она находилась напротив нижней части пластикового контейнера.
Переверните контейнер и сделайте пометку на каждой стороне монтажного кольца пружины.
Просверлите эти две отметки с 1/8 “сверлом.



Шаг 10. Закрепите пружину:
Используя отверстия, которые вы только что просверлили, закрепите стяжкой пружину на дне пластикового контейнера.



Шаг 11. Подготовьте место для двигателя:
Установите сервопривод на внутренней стороне пластикового контейнера рядом с опорой, таким образом, чтобы часть двигателя на внутренней поверхности контейнера и нижняя часть находились на одном уровне с одной из боковых стенок.
Сделайте пометки для монтажа отверстий сервопривода и просверлите их с 1/8 “сверлом.



Шаг 12. Установите двигатель:
Используя монтажные отверстия, которые были только что просверлены, закрепите стяжкой двигатель на месте так, что сервопривод находился близко к опоре.
Стержни, торчащие из лопастей сервопривода, должны вступать в контакт с болтом, вставленным в опоре.

Шаг 13. Просверлите отверстие:
Просверлите отверстие1/8 ” в месте на пластиковом контейнере, где вы сможете свободно протянуть провода сервопривода без вмешательства в работу двигателя.


Шаг 14. Монтаж батареек:
Поскольку пластиковый контейнер пока еще перевернут вверх дном, установите отсек для батареек с центром на вершине контейнера.
Сделайте пометку в каждом из крепежных отверстий отсека, а затем используйте их в качестве руководства для сверления двух дырок размером 1/8 “.



Шаг 15. Установите отсек для батареек:
Закрепите отсек для батареек на внешней стороне пластикового контейнера, используя 4-40 х 1/4 “гайки и болты.

Шаг 16. Подключите провода:
Спаяйте вместе красный провод от отсека для батареек с красным проводом от серводвигателя, а черный провод от отсека для батарей с черным проводом от сервопривода.

Шаг 17. Приведите всё в порядок:
Закрепите стяжкой провода вместе, чтобы сделать их аккуратнее и отделить спаянные соединения, так чтобы они не вступали в контакт друг с другом.

Шаг 18. Вставьте батарейки:
Последнее, что осталось сделать, это вставить четыре батарейки АА, и вы сразу же увидите, как робот начнет двигаться. Мы уверены, вам понравится!
Как собрать робота самостоятельно в домашних условиях: от простого к сложному
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Первоначально запаивают датчики с учетом полярности подсоединения фотодиодов и фототранзисторов. Их размещают по углам платы с одного края, располагая так, чтобы они смотрели в разные стороны. Это передняя часть робота, его «глаза».
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
КАК СДЕЛАТЬ РОБОТА
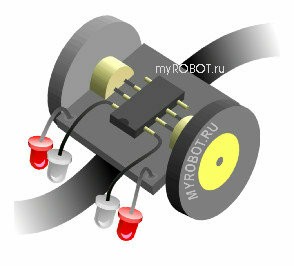
Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов, микросхемы и фотоэлементов робот будет двигаться на свет или, наоборот, прятаться в темноту, бежать вперед в поисках света или пятиться, как крот, назад. Если добавить в схему робота пару ярких светодиодов, то можно добиться, чтобы он бегал за рукой и даже следовал по темной или светлой линии.
 Принцип поведения робота основывается на “фоторецепции” и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция – одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
Принцип поведения робота основывается на “фоторецепции” и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция – одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом – ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости.
В устройстве робота, кроме микросхемы драйвера моторов L293D , будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор.
В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов. Провод, соединяющий различные части схемы с “землей” (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с “землей”. Иногда рядом с такой черточкой пишут три буквы “GND”, что означает “землю” (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.

Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал и мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится. Более подробно о работе с драйвером двигателей можно прочитать в предыдущей статье “Драйвер двигателей L293D”.

Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом. От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если – небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы предохранить фототранзистор от перегрева и выхода из строя.
 Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Сделать робота, реализующего реакцию фототаксиса (направленного движения к свету или от света), можно с использованием двух фотосенсоров.
Когда на один из фотосенсоров такого робота попадает свет, включается соответствующий сенсору электромотор и робот поворачивает в сторону света до тех пор, пока свет не осветит оба фотосенсора и не включится второй мотор. Когда оба сенсора освещены, робот движется навстречу источнику света. Если один из сенсоров перестает освещаться, то робот снова поворачивает в сторону источника света и, достигнув положения, при котором свет падает на оба сенсора, продолжает свое движение на свет. Если свет перестает падать на фотосенсоры, робот останавливается.
Схема робота симметричная и состоит из двух частей, каждая из которых управляет соответствующим электромотором. По сути, она является как бы удвоенной схемой предыдущего робота. Фотосенсоры следует располагать крест-накрест по отношению к электромоторам так, как показано на рисунке робота выше. Также можно расположить моторы крест-накрест относительно фотосенсоров так, как показано на монтажной схеме ниже.

 Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.
Если мы расположим сенсоры в соответствии с левым рисунком, то робот будет избегать источников света и его реакции будут похожи на поведение крота, прячущегося от света.
 Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а “увидев” свет, будет поворачивать в сторону его источника. Когда свет будет падать на оба сенсора, робот остановится.
Сделать поведение робота более живым можно, подав на входы INPUT2 и INPUT3 положительный сигнал (подключить их к плюсу источника питания): робот будет двигаться при отсутствии падающего на фотосенсоры света, а “увидев” свет, будет поворачивать в сторону его источника. Когда свет будет падать на оба сенсора, робот остановится.
Дорогой Бобот, а можно ли использовать в приводимой схеме простейшего робота какие-либо другие микросхемы, например L293DNE?
Конечно, можно, но видишь ли, в чем дело, дружище Бибот. Настоящая L293D выпускается только группой компаний ST Microelectronics. Все остальные подобные микросхемы являются лишь заменителями или аналогами L293D . К таким аналогам относятся L293DNE американской компании Texas Instruments, SCP-3337 от Sensitron Semiconductor. Естественно, что, как и многие аналоги, эти микросхемы имеют свои отличия, которые тебе будет необходимо учитывать, когда ты будешь делать своего робота.
А не мог бы ты рассказать об отличиях, которые мне необходимо будет учесть при использовании L293DNE.
С удовольствием, старина Бибот. Все микросхемы линейки L293D имеют входы, совместимые с TTL-уровнями*, но лишь совместимостью уровней некоторые из них не ограничиваются. Так, L293DNE имеет не только совместимость с TTL по уровням напряжения, но и обладает входами с классической TT-логикой. То есть на неподключенном входе присутствует логическая “1”.
Прости, Бобот, но я не совсем понимаю: как же мне это учитывать?
Если на неподключенном входе у L293DNE присутствует высокий уровень (логическая “1”), то и на соответствующем выходе мы будем иметь сигнал высокого уровня. Если мы теперь подадим на рассматриваемый вход сигнал высокого уровня, говоря по другому – логическую “1” (соединим с “плюсом” питания), то на соответствующем выходе ничего не изменится, так как на входе у нас и до этого была “1”. Если же мы подадим на наш вход сигнал низкого уровня (соединим с “минусом” питания), то состояние выхода изменится и на нем будет напряжение низкого уровня.
То есть получается все наоборот: L293D мы управляли с помощью положительных сигналов, а L293DNE нужно управлять с помощью отрицательных.
 L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к “земле” подтягивающими резисторами.
L293D и L293DNE можно управлять как в рамках отрицательной логики, так и в рамках положительной*. Для того чтобы управлять входами L293DNE с помощью положительных сигналов, нам будет необходимо подтянуть эти входы к “земле” подтягивающими резисторами.
Тогда, при отсутствии положительного сигнала, на входе будет присутствовать логический “0”, обеспечиваемый подтягивающим резистором. Хитроумные янки называют такие резисторы pull-down, а при подтягивании высокого уровня – pull-up.
Насколько я понял, все, что нам нужно будет добавить в схему простейшего робота, – так это подтягивающие резисторы на входы микросхемы драйвера моторов.
 Ты совершенно правильно понял, дорогой Бибот. Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.
Ты совершенно правильно понял, дорогой Бибот. Номинал этих резисторов можно выбрать около 4,7 кОм. Тогда схема простейшего робота будет выглядеть следующим образом.
Причем от номинала резистора R1 будет зависеть чувствительность нашего робота. Чем сопротивление R1 будет меньше, тем чувствительность робота будет ниже, а чем оно будет больше, тем чувствительность будет выше.
 А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к “земле”. Что даже несколько упростит схему.
А так как в данном случае нам нет необходимости управлять мотором в двух направлениях, то второй вывод мотора мы можем подключить напрямую к “земле”. Что даже несколько упростит схему.
И последний вопрос. А в тех схемах роботов, которые ты привел в рамках нашей беседы, может быть использована классическая микросхема L293D?
Конечно, может. И я бы даже добавил, что использование pull-down резисторов для L293D будет вполне оправдано.
Чтобы сделать робота, “бегающего” за рукой, нам понадобятся два ярких светодиода (на схеме LED1 и LED2). Подключим их через резисторы R1 и R4, чтобы скомпенсировать протекающий через них ток и предохранить от выхода из строя. Расположим светодиоды рядом с фотосенсорами, направив их свет в ту же сторону, в которую ориентированы фотосенсоры, и уберем сигнал с входов INPUT2 и INPUT3.
 Задача получившегося робота – реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля “зрения” одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Задача получившегося робота – реагировать на отраженный свет, который излучают светодиоды. Включим робота и поставим ладонь перед одним из фотосенсоров. Робот повернет в сторону ладони. Переместим ладонь немного в сторону так, чтобы она скрылась из поля “зрения” одного из фотосенсоров, в ответ робот послушно, как собачка, повернет за ладонью.
Светодиоды следует подбирать достаточно яркие, чтобы отраженный свет устойчиво улавливался фототранзисторами. Хороших результатов можно достичь при использовании красных или оранжевых светодиодов с яркостью более 1000 мКд.
Если робот реагирует на вашу руку только тогда, когда она почти касается фотосенсора, то можно попробовать поэкспериментировать с листочком белой бумаги: отражающие способности белого листа намного выше, чем у человеческой руки, и реакция робота на белый листок будет намного лучше и устойчивее.
Белый цвет обладает самыми высокими отражающими свойствами, черный – наименьшими. Основываясь на этом, можно сделать робота, следующего по линии. Сенсоры при этом следует расположить так, чтобы они были направлены вниз. Расстояние между сенсорами должно быть немного больше, чем ширина линии.
 Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед. Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Cхема робота, следующего по черной линии, идентична предыдущей. Чтобы робот не терял черную линию, нарисованную на белом поле, ее ширина должна быть около 30 мм или шире. Алгоритм поведения робота достаточно прост. Когда оба фотосенсора улавливают отраженный от белого поля свет, робот движется вперед. Когда один из сеносоров заезжает на черную линию, соответствующий электромотор останавливается и робот начинает поворачиваться, выравнивая свое положение. После того как оба сенсора снова находятся над белым полем, робот продолжает свое движение вперед.
Примечание:
На всех рисунках роботов микросхема драйвера двигателей L293D показана условно (только управляющие входы и выходы).
Понижающие buck-конвертеры и их крутые применения
Buck-конвертер представляет собой вездесущий DC-DC преобразователь, который эффективно понижает напряжение. Эффективное преобразование напряжения питания увеличивает срок службы батареи, уменьшает тепловыделение и позволяет создавать небольшие гаджеты. Buck-конвертер может использоваться во многих крутых применениях. В данной статье приводится краткое введение в buck-конвертер, охватывается несколько крутых применений схем buck-конвертера (и его двоюродного брата – полумоста) и предоставляются ссылки на ресурсы, где заинтересованные читатели могут больше узнать о конкретных микросхемах для использования в своих проектах.
Введение в понижающие buck-конвертеры
Buck-конвертер – это простая схема. На рисунке 1 представлена упрощенная схема buck-конвертера. MOSFET транзистор на стороне высокого напряжения во время работы открывается и закрывается. Для управления выходным напряжением управляющая микросхема (не показана) использует замкнутый контур обратной связи. Функция передачи постоянного напряжения представляет собой формулу, которая связывает входное напряжение, выходное напряжение и коэффициент заполнения buck-конвертера. Vвых = Vвх*D , где Vвых – выходное напряжение, Vвх – входное напряжение, D – коэффициент заполнения или процент времени, в течение которого MOSFET транзистор открыт. Катушка индуктивности и конденсатор на рисунке 1 формируют фильтр нижних частот. Этот фильтр нижних частот сглаживает эффект переключений MOSFET транзистора и обеспечивает хорошее, ровное, постоянное напряжение.
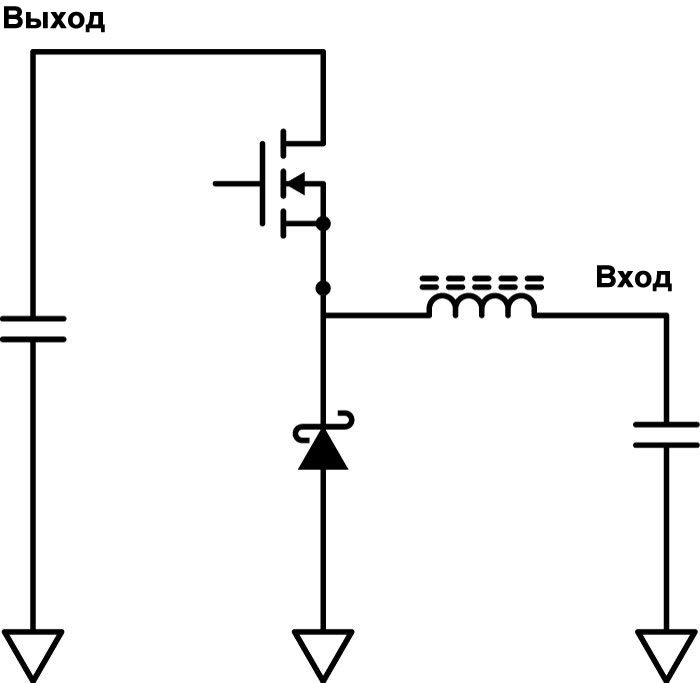 Рисунок 1 – Упрощенная схема несинхронного buck-конвертера. В качестве примера контроллера несинхронного buck-конвертера можно привести микросхему TPS5430
Рисунок 1 – Упрощенная схема несинхронного buck-конвертера. В качестве примера контроллера несинхронного buck-конвертера можно привести микросхему TPS5430
На рисунке 2 показан распространенный вариант buck-конвертера: синхронный buck-конвертер. В синхронном buck-конвертере неуправляемый диод заменен на MOSFET транзистор. Использование MOSFET транзистора также допускает двунаправленную передачу напряжения питания. Если buck-конвертер работает в обратном направлении, то его можно использовать в качестве повышающего boost-конвертера. Для этого потребуется специальная микросхема преобразователя. Это используется в таких приложениях, как USB On-the-Go (OTG), которые позволяют использовать ваш смартфон для питания небольшой портативной электроники.
Два MOSFET транзистора в этой компоновке называются полумостом. Полумосты также являются очень полезными схемами, которые имеют множество применений.
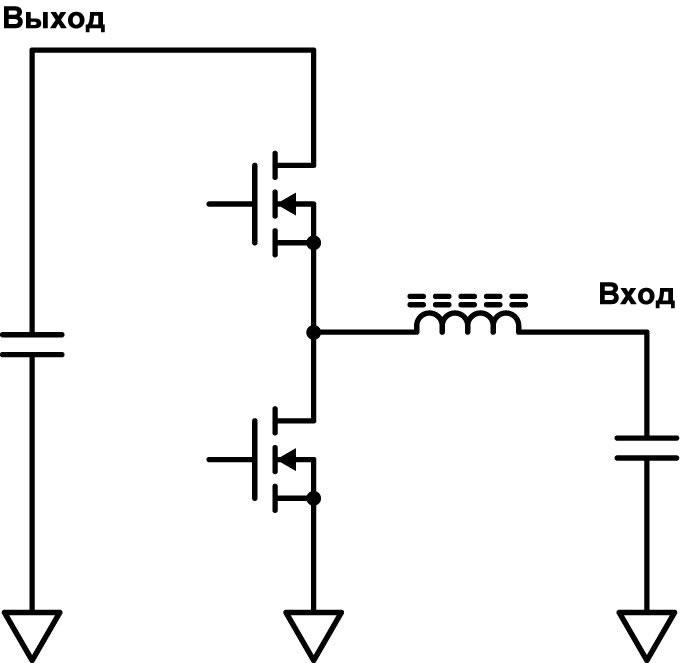 Рисунок 2 – Упрощенная схема синхронного buck-конвертера. В качестве примера контроллера синхронного buck-конвертера можно привести микросхему LM5119
Рисунок 2 – Упрощенная схема синхронного buck-конвертера. В качестве примера контроллера синхронного buck-конвертера можно привести микросхему LM5119
Buck-конвертеры используются везде. Остальная часть статьи охватывает некоторые распространенные приложения.
USB On-The-Go (OTG)
USB On-The-Go позволяет подключать к смартфону клавиатуру, мышь и другие периферийные устройства. Периферийное устройство получает питание от USB порта телефона. Регулировка напряжения питания обрабатывается с помощью синхронного buck-конвертера, который может передавать напряжение питания в обоих направлениях. Когда телефон подключен к зарядному устройству, buck-конвертер работает как понижающий buck-конвертер для зарядки литиевого аккумулятора на телефоне. А когда подключено периферийное устройство, buck-конвертер работает в обратном направлении в качестве повышающего boost-конвертера для генерации напряжения 5 В из напряжения литиевой батареи. Ознакомьтесь с этими ссылками от Texas Instruments и Linear Technology, чтобы узнать больше о двунаправленных DC-DC преобразователях, поддерживающих USB On-The-Go (OTG).
 Рисунок 3 – Некоторые популярные смартфоны
Рисунок 3 – Некоторые популярные смартфоны
POL конвертер для PC и ноутбуков
Конвертер Point-Of-Load, или POL, – это неизолированный понижающий buck-конвертер, который способен эффективно управлять питанием нагрузок при высоких токах. Это особенно полезно для материнских плат ПК и ноутбуков. Современные процессоры работают с очень низким напряжением, обычно 1,8 В. Для этих целей используется синхронный buck-конвертер, иногда многофазный. В технических описаниях на материнские платы этот POL конвертер часто называется Voltage Regulator Module, или VRM (модуль регулятора напряжения). Murata производит конвертеры Point-Of-Load, подобные этому.
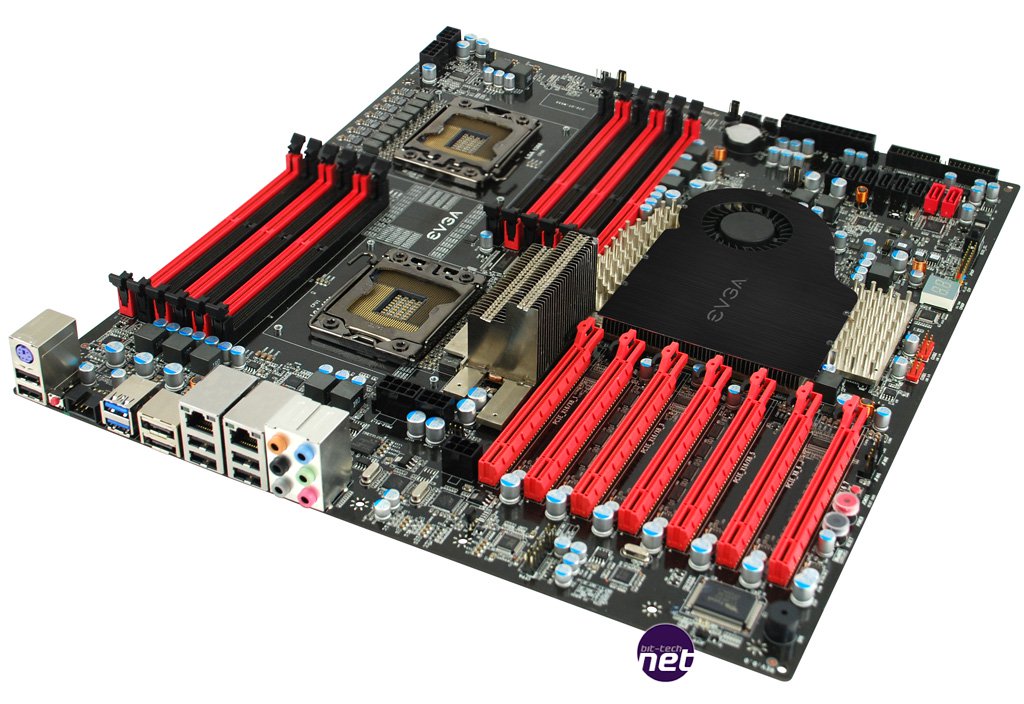 Рисунок 4 – Материнская плата
Рисунок 4 – Материнская плата
Зарядные устройства
Все хотят, чтобы их смартфон, планшет или портативный аккумулятор заряжались быстро, и при этом не нагреваясь. Лучший способ для этого – синхронный buck-конвертер. Как правило, порт зарядки для мобильного устройства представляет собой порт microUSB. На него подаются стабилизированные 5 вольт. Схема зарядки, находящаяся внутри мобильного устройства, часто представляет собой понижающий buck-конвертер. Некоторые контроллеры buck-конвертеров, такие как эта микросхема от Linear Technology, имеют встроенные умные контроллеры батарей.
 Рисунок 5 – Ноутбук
Рисунок 5 – Ноутбук
Зарядные устройства на солнечных элементах
Сильной стороной buck-конвертеров является эффективное преобразование высокого напряжения в низкое. Существует множество продуктов, предназначенных для зарядки аккумулятора от солнечной панели с более высоким напряжением. Зарядное устройство на солнечных элементах имеет функцию, которой не обладают другие buck-конвертеры, и которая называется отслеживание точки максимальной мощности. Солнечные элементы обладают нелинейными вольт-амперными характеристиками. Зарядное устройство на солнечных элементах часто представляет собой buck-конвертер с микроконтроллерным управлением. Чтобы зарядить аккумулятор в кратчайшие сроки, микроконтроллер заставляет buck-конвертер выдавать максимальную мощность путем изменения тока нагрузки. Некоторые buck-конверторы имеют встроенное отслеживание точки максимальной мощности и контроллер заряда литиевых батарей, например, LT3652 от Linear Technology.
 Рисунок 6 – Складывающаяся солнечная панель для туристов
Рисунок 6 – Складывающаяся солнечная панель для туристов
Мощные аудиоусилители
Мощный выходной каскад усилителей мощности класса D представляет собой синхронный buck-конвертер. Одно большое различие между DC-DC преобразователем и аудиоусилителем класса D заключается в том, что DC-DC преобразователь выдает на нагрузку фиксированное постоянное напряжение, а усилитель класса D намеренно производит сигнал переменного напряжения. Разница заключается в петле обратной связи. Обратите внимание, что выходной каскад представляет собой полумост, после которого идет LC фильтр. Хорошим примером усилителя класса D является TDA8954 от NXP.
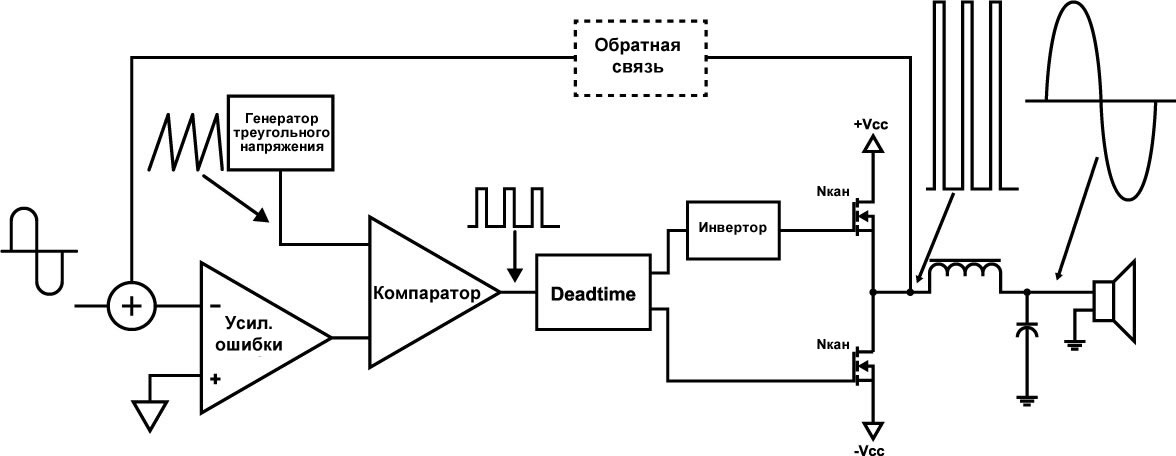 Рисунок 7 – Упрощенная схема усилителя класса D
Рисунок 7 – Упрощенная схема усилителя класса D
Силовые инверторы с чистой синусоидой
Чистосинусоидальные силовые инверторы создают синусоидальное переменное напряжение, питаясь от источника постоянного напряжения, такого как аккумулятор. Вы можете использовать силовой инвертор для питания домашнего электронного устройства большой мощности от большого аккумулятора или от сети автомобиля. Мощный инвертирующий каскад силового инвертора похож на усилитель класса D.
Квадрокоптеры
Buck-конверторы используются в квадрокоптерах. Квадрокоптеры часто питаются от аккумуляторных батарей из соединенных последовательно 2-6 ячеек. Эти аккумуляторные батареи выдают напряжение в диапазоне 6В–25В. Buck-конвертор понижает это напряжение батареи до 5В или 3,3В для использования контроллером полета (мозг квадрокоптера). В сфере квадрокоптеров buck-конверторы часто называют BEC (сокращение от “battery elimination circuit”) или UBEC (universal battery elimination circuit). Схемы BEC и UBEC часто встречаются в электронных регуляторах скорости, которые управляют бесколлекторными двигателями квадрокоптера, или на распределительной плате питания, которая разводит питание туда, куда нужно.
 Рисунок 8 – Квадрокоптер
Рисунок 8 – Квадрокоптер
Контроллеры бесколлекторных двигателей
Квадрокоптеры используют для полетов бесколлекторные двигатели из-за их высокой эффективности и малого веса. Для управления обмотками бесколлекторного двигателя используется три полумоста. На рисунке 9 показана упрощенная схема драйвера бесколлекторного двигателя. Он выглядит как 3 синхронных buck-конвертера без конденсаторов фильтра. На рисунке 10 показан реальный электронный контроллер скорости, используемый в квадрокоптерах.
 Рисунок 9 – Упрощенная схема контроллера бесколлекторного двигателя
Рисунок 9 – Упрощенная схема контроллера бесколлекторного двигателя  Рисунок 10 – Электронный контроллер скорости, используемый в любительских конструкциях. Этот конкретный контроллер скорость включает в себя встроенный buck-конвертер
Рисунок 10 – Электронный контроллер скорости, используемый в любительских конструкциях. Этот конкретный контроллер скорость включает в себя встроенный buck-конвертер
Силовые каскады, которые являются синхронными, позволяют подавать питание в направлении от двигателей на аккумуляторную батарею. Это процесс, известный как регенеративное торможение, который используется в электропоездах и электромобилях, в том числе Tesla Roadster.
Контроллеры коллекторных двигателей
Коллекторный двигатель можно приводить в движение с помощью схемы, называемой высоковольтным управлением двигателем. Схема построена на базе синхронного конвертера без выходного конденсатора.
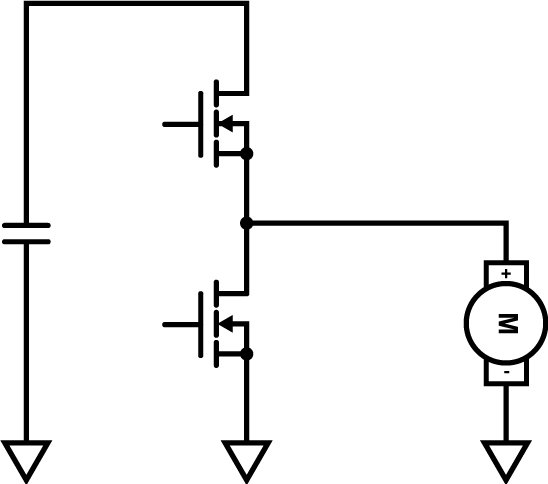 Рисунок 11 – Упрощенная схема контроллера коллекторного двигателя. Обратите внимание на сходство с buck-конвертером
Рисунок 11 – Упрощенная схема контроллера коллекторного двигателя. Обратите внимание на сходство с buck-конвертером
Заключение
В данной статье представлено кратное введение в понижающие buck-конвертеры. Buck-конвертер и их двоюродный брат полумост используются во многих крутых приложениях, включая смартфоны, ноутбуки, планшеты, портативные аккумуляторные батареи, фонарики, квадрокоптеры. Схемы аудиоусилителей и управления двигателями имеют много общего с buck-конверторами.
Реставрация и декор старого советского табурета!

Драсьте!
Спасибо что заглянули, очень приятно.

Итак. Стоял у меня в кладовке старый советский табурет, жена методом исключения подсчитала что куплен он родителями был еще в 40х годах прошлого века. Довольно таки старенький но все еще достаточно крепкий экземпляр. И вот, жена попросила его как то облагородить, подкрасить или может обклеить мебельной пленкой, что то типа винила. Да и подклеить, за это время он конечно же рассохся. В общем придать ему более менее презентабельный вид, его же можно еще эксплуатировать, а он стоит мертвым грузом, место занимает.
Но мы же легких путей не ищем или, как говориться, делать — так уж делать.
С мыслью о том, как я его вижу в новом исполнении и прикинув по материалам которые у меня есть и что надо прикупить лег спать. Утро вечера мудренее! На следующий день на работе все обдумал и окончательно прикинул проект в своей голове. Табурет почему то виделся мне в стиле связанном со старыми парусными кораблями 16-18 веков. Ну а дальше что получилось, смотрите сами.
Ну что же надо делать, раз уж решился. Сгонял в Оби, подкупил необходимого материала для декора.
Погнал к свояку в гараж. И приступил к работе.
Для начала нужно было содрать старую краску со всех поверхностей табурета. Вооружившись строительным феном и скребком приступил к удалению старой краски.



Красочка ввиду своего не однократного слоя и старения удалялась достаточно не охотно. Но мы же терпеливые!
Едем дальше. По ходу удаления краски, начинаем разбирать сею конструкцию. И уже удалять краску с остальных (внутренних) поверхностей. Далее все это хозяйство за чистилось машинкой с наждачкой, дабы подготовить поверхность к покраске.



Все пока. Готовим саморезы и клей. Собираем табурет обратно, при этом сажая его части на клей. Я использовал “Момент монтаж” в тубусе под монтажный пистолет. Верхнюю часть засверливал и крепил к ногам на саморезы.
Дальше табурет протер, обезжирил и нанес грунт. Грунт и краску брал в баллончиках, так по удобнее чем кистью и ровнее.

На загрунтованный табурет на термоклей с помощью термопистолета декорировал канатами.

Все. Табурет подсыхает. Приступаем к покраске. У меня был баллон с красной краской, заполненный примерно на 70%, по грунту так же, может меньше.
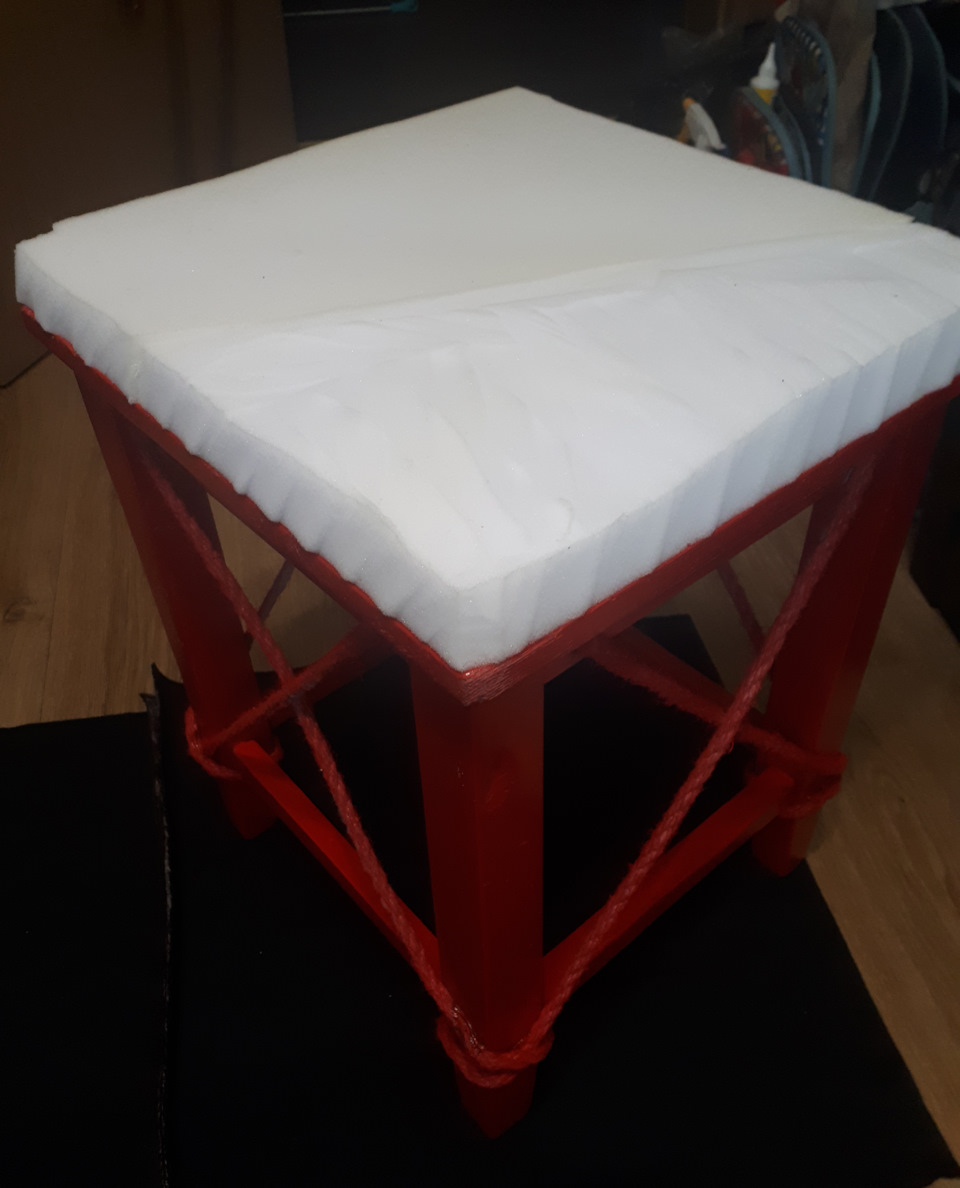
Красим. Красный цвет ассоциирует поверхность палубы старого парусного корабля. Канаты, соответственно оснастку парусника, тросы парусов и т.д.

Краска сохнет. Собираю шмотки и мчу домой. Дома табурет до полного высыхания стоял больше суток. Ну и плюс времени не особо было. Но нужно же доделать.
Дальше делаю мягкую сидушку и обтягиваю тканью. Смотрим!
Для мягкой сидушки брал мебельный поролон, целого куска у меня не нашлось, был какой то конусовидный остаток, разрезал его пополам и наклеил 2 половины на клей “Момент универсальный”. Взяло плотно. Лишний поролон обрезал канцелярским ножом по периметру сидушки.

Дальше приступил к обтяжке тканью. Какая ткань не скажу, не шарю, был кусок. Ткань похожа на бархат с рисунком, была с подложкой, поэтому на поролон больше ничего не натягивал, сразу ткань.
Ткань отрезаем по периметру сидушки, оставляя по краям запас сантиметров 10. Мне хватило 8ми сантимов запаса для натяжки ткани, но потом лишнее еще подрезал.
Ткань фиксировал по четырем сторонам строительным степлером. Скобы на 8мм. Шел от середины к краям. Потом когда стороны пробил, заделал углы, срезая лишнюю ткань в углах. Ткань нужно натягивать, чтобы не было провисов и морщин.


С тканью закончил, проверил чтобы не было нигде на ткани морщин, лишнее срезал, пробил степлером еще где потребовалось.

В конце по периметру сидушки, вокруг табурета декорировал толстым канатом. Этот канат ассоциирует швартовый трос. Думал может якорный канат, но нет, там цепь!))
Ну и вот в общем что вышло. Сильно не пинайте, это все же творчество, ну так я увидел, а уж как получилось, судить вам! Жена была в шоке, так как такого не ожидала, думала я просто его подкрашу и подклею. Мне самому понравилась своя работа, а как же по другому!
Мастер класс по реставрации деревянного старого стула своими руками
Во время уборки на даче/дома вы нашли свой любимый деревянный стул. Конечно же грустно, что он старенький и весь потрескался, но его состояние всё ещё отличное. Выкидывать его не хочется (да и воспоминаний много с ним связано), поэтому вы решаете его отремонтировать и снова использовать. Как это будет выглядеть?
Вариант №1. Поход в столярную мастерскую, чтобы сделать ремонт (не факт, что хороший).
Вариант №2. Самый распространённый — «хочу надёжно и надолго, значит я сделаю это сам». Да, ремонт старой мебели своими руками — наиболее удачный в плане экономии затрат на реставрацию и возможности почувствовать себя Мастером (именно так, с большой буквы). Без долгих славословий предлагаем перейти к реставрационному ремонту деревянного стула своими руками.
Инструменты и материалы для реставрации
Основной материал уже есть — стул. Чтобы привести его в должный вид, берём следующие «ингредиенты» для работы:
- Мебельный поролон для сидушки (выбираем толщину по уровню любви сидеть — жёстко, не очень жестко или мягко);
- Мебельный степлер;
- Морилка и лак;
- Кисти шириной 45 мм, жёсткая, 2 штуки;
- Лист 4-хслойной фанеры для сидушки (замена обязательна, если не хотите упасть как в школе);
- Мебельный клей «Момент столярный»;
- Струбцины для скрепления элементов стула;
- Мебельный гобелен (продаётся в мебельных и обычных магазинах ткани);
- Молоток, деревянная киянка, шлифмашина, шуруповёрт, дрель, электролобзик;
- Шурупы, металлические уголки для усиления конструкции;
- Пять свободных дней для самой работы (исходим из того, что клею надо просохнуть, как и лаку с морилкой, каждому сутки).














Набор внушает опасения только своим перечислением? Для начинающего мастера — это ещё только малая часть (у более опытных этот список может доходить и до полусотни пунктов, а работа по реставрации стула с декорированием может занять месяц). Переходим к приятной части любой работы.
Мастер-класс по реставрации стула своими руками (пошаговая инструкция с фото)
Инструменты приготовлены? Стул и вы готовы? Вперёд!
1) Смотрим, как был скреплён стул. В первую очередь надо разобрать все, что «шевелится»:
- Где есть шурупы -аккуратно их снимаем,
- Деревянные нагели на ножках убираем осторожно дрелью (просто их высверливаем),
- Очень осторожно вытаскиваем гвозди (если стул был сколочен).


2) Пронумеровываем все детали, какие есть. Обязательно. Нумерация идёт от ножек вверх. Соответственно у вас должно быть от 10 деталей минимум, в зависимости от того, как был сделан стул:
- Ножки,
- Поперечины для ножек,
- Сиденье,
- Две планки для спинки,
- Сама спинка.
Тщательно осматриваем на предмет трещин все детали (всё сразу не увидеть, не переживайте). Если сомневаетесь в своей памяти — при реставрации мебели сделайте обычное фото. Помогает, честное слово.

3) Склеиваем все треснувшие детали. Излишки клея снимутся после при шлифовке.
4) Обращаем особое внимание на ремонт сиденья стула:
- Старое фанерное сиденье просто обводим на новом листе фанеры, аккуратно вырезаем лобзиком,
- На новое фанерное сиденье приклеиваете как можно тщательнее поролон (также вырезанный по форме сидушки),
- По краям закрепляете поролон обязательно мебельным степлером, оставляете на сутки сохнуть.
Старое сиденье выкидываем.

4) После склейки деталей тщательно ошкуриваете их шлифовальной машиной и наждачной бумагой (круглые и мелкие детали пройти шлиф.машиной не получится). Оставшуюся мелкую пыль убираете чуть влажной тряпкой. Ещё раз осматриваем всё на предмет трещин.
Вот видео по реставрации старого стула от одного домашнего мастера, возможно вам будет интересно:
5) Доделываем сиденье. При реставрации старого стула это не менее важно, чем процесс ремонта. На самой широкой части сиденья крепим степлером гобелен, очень туго натягиваем вперёд, загибаем края под сиденье. По каждому краю должно быть не менее 5 см ткани. Закрепляем ткань мебельным степлером на расстоянии 1-2 см. Повторяем процедуру по всем бокам сиденья.
В итоге получается такой своеобразный барабан, внутри которого не пустота, а поролон.

Продолжение видео от домашнего мастера, реставрация сиденья своими руками:
6) Все детали покрываем морилкой, через сутки прокрашиваем 3-4 слоями лака, чтобы стул не покрылся трещинами при первой же посадке гостя на него.

7) Собираем стул. При склеивании деталей не жалеем клея, излишки очень аккуратно стираем и убираем чуть влажной тряпкой.
Гвозди нужного эффекта «долгожития» не оказывают.
 Покрываем ещё раз слоем лака, чтобы скрыть неровности и все — ваш стул отреставрирован и готов к использованию снова!
Покрываем ещё раз слоем лака, чтобы скрыть неровности и все — ваш стул отреставрирован и готов к использованию снова!

Окончание видео по реставрации стула от домашнего мастера:
Видео: реставрация стула своими руками
Посмотрите отличный мастер-класс по реставрации и декорированию стула от лучшей половины человечества — как видите, это по силам не только мужчинам!
Чтобы вам поднять настроение перед предстоящей работой, предлагаем вдохновиться некоторыми идеями.
Идеи реставрации стула: от классики до модерна
Театр начинается, как было сказано множество раз, с вешалки, а квартира и дом начинаются со стула. Да, именно с него.
Самой популярной идеей реставрации этого предмета мебели является стиль Кантри или Прованс за то, что они вписываются в любой интерьер:





